
Anyone who has needed a dental crown knows the drill, literally and figuratively: a checkup reveals a cavity too large to fill, the dentist removes the decay and shapes the tooth, an impression is taken, a temporary crown goes on, and the patient leaves with at least one more appointment already on the calendar before the permanent crown can be fitted.
Researchers at the University of Basel’s Department of Biomedical Engineering think they can shrink that process down to a single visit, thanks to a robot small enough to fit inside an open mouth.
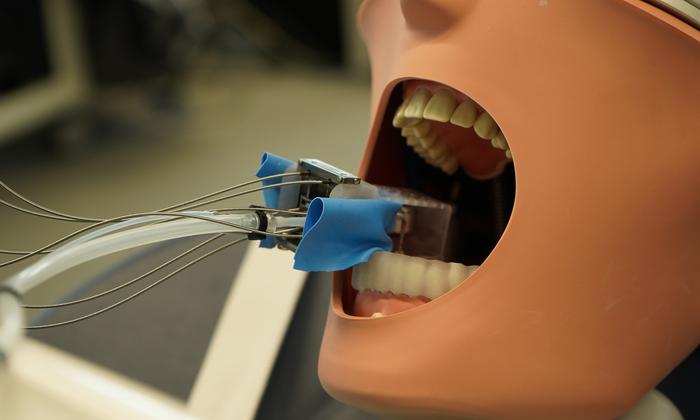
The prototype, called MIR — short for Miniature Intraoral Robot — measures just 43 by 26 by 28 millimeters, roughly the size of a wine cork. Its motors and control electronics sit outside the mouth, connected to the working end by flexible drive shafts, cables and tubes, which is what allows the business end of the device to stay so small. “It is designed to be small enough to fit comfortably into an open mouth,” said Dr. Yukiko Tomooka, first author of the paper describing the robot in IEEE Transactions on Medical Robotics and Bionics.
The dental industry has already moved partway toward single-visit crowns through chairside milling systems that scan a prepared tooth and carve a ceramic crown on the spot, eliminating the wait for a dental lab. What’s been missing from that workflow is automation of the preparation step itself — the actual removal of tooth structure, which today still relies entirely on a dentist’s hand guiding a drill. MIR is aimed squarely at that remaining gap.
The team’s goal is to collapse the usual multi-appointment crown process into one trip. Under the proposed workflow, a dentist would scan the tooth during the initial appointment, and that scan would do double duty: it would let the dentist plan precisely how MIR should remove tooth material, and it would let the lab start fabricating the permanent crown immediately, rather than waiting for a second appointment’s worth of impressions. The same scan is also used to produce a custom-fitted dental splint that anchors the robot in the mouth. “Even if the patient turns their head, the MIR moves with them,” Tomooka said.
MIR works in two stages. First, a wide drill reduces the bulk of the tooth’s surface from above. Then a longer, thinner drill shapes the sides of the tooth to its final form, following the digital plan generated from the initial scan.
In bench tests using both synthetic resin tooth models and a ceramic material chosen to mimic the hardness of natural enamel, the robot’s positioning held to within less than 0.2 millimeters of its target — notable, the researchers say, given that the current prototype has no sensors yet to detect or correct its own position in real time. The team expects accuracy to improve further once sensors are integrated into the system.
The researchers also measured the forces the robot generates while drilling, finding they stayed below five newtons — roughly the downward force exerted by a half-liter bottle of water resting under gravity. They are separately studying the noise the system produces, an important consideration for any device meant to operate at close range inside a patient’s mouth, where both comfort and anxiety management are part of the clinical equation.
Before MIR can move from the lab bench to the dental chair, the team plans to add sensors and a camera that let the system track both its own position and the progress of the drilling in real time. Research group leader Professor Georg Rauter said the aim is to give the robot a kind of persistent spatial memory. “Even after a power outage, MIR would know where it is and where it needs to continue, based on the sensor data,” Rauter explained. The challenge, he added, is adding that capability without making the already-small device any bigger — a familiar constraint in medical robotics, where every added component competes for space with the anatomy the device has to work around.
The project was developed with funding from Innosuisse, Switzerland’s innovation agency, in collaboration with the Center for Dentistry at the University of Zurich, the Basel-based dental implant company Camlog Biotechnologies, and the University of Bern. Rauter’s lab regularly partners with practicing physicians and dentists on medical robotics projects, a collaboration model the team credits for keeping the robot’s design grounded in real clinical workflows rather than purely theoretical engineering goals.
If MIR eventually reaches dental practices, the appeal for patients is straightforward: fewer appointments, less time spent wearing a temporary crown, and a shorter overall treatment timeline for a procedure that, for many people, already ranks among the more dreaded routine dental visits. The appeal for dental practices is more about throughput — condensing what is currently billed and scheduled as two separate procedures into one, without sacrificing the precision that a crown preparation demands.
For now, the robot remains a research prototype. Sensor integration, camera-based position feedback, noise characterization and eventually clinical testing on real patients all still lie ahead before MIR could be cleared for use in an actual dental practice. But the underlying case — that a tooth-sized cutting tool guided by a pre-treatment scan can match the precision of a trained human hand — appears to already hold up on the bench.
Endnotes
Journal: IEEE Transactions on Medical Robotics and Bionics
DOI: 10.1109/TMRB.2026.3682629
Source: University of Basel, via EurekAlert!, June 23, 2026
IMAGE CREDIT: University of Basel, Catherine Weyer.


Leave a Reply