HAVE YOUR SAY.
Join us in The Bullpen, where the members of the Scientific Inquirer community get to shape the site’s editorial decision making. We’ll be discussing people and companies to profile on the site. On Wednesday, October 26 at 5:30pm EST, join us on Discord and let’s build the best Scientific Inquirer possible.
The construction of large structures is one of the main development trends of the space exploration in the future, such as large space stations, large space solar power stations, and large space telescopes. However, due to their large size, such structures cannot be carried directly into space by rockets or spacecraft. Therefore, these large structures need to be broken down into multiple modular units, which are brought into space by a launch vehicle and then assembled. This is an important task of on-orbit servicing (OOS): on-orbit assembly. It is one of important development tendency, which aims to make full use of space robots to assemble space structures autonomously in the aerospace industry. In a review paper recently published in Space: Science & Technology, Qirong Tang from Tongji University and Delun Li and other experts and engineers from China Academy of Space Technology summarized the development status of space robot technology and the relevant space robot on-orbit assembly technology in recent decades.
First of all, the author introduced the research status of on-orbit assembly of space robots. The aerospace industry had been researching and practicing on-orbit service technology for decades. It was known that the space on-orbit assembly task could be completed by space robots and astronauts in collaboration. Although manual assembly by astronauts had proven to be an effective method for constructing space structures, this method had many limitations. Therefore, it was very necessary to use space robots to autonomously complete on-orbit assembly tasks. In general, space on-orbit assembly technology has gradually developed from manual operation to autonomous work. The way of working has shifted from simple assisted astronaut operations to autonomous assembly and maintenance.
Mission scenes have also changed from a single small object to a large spatial structure. However, in terms of the development of space-in-orbit assembly technology, it has not yet matured and applied. However, as far as the development of space on-orbit assembly technology was concerned, it had not yet been matured and applied. Moreover, as the size of the object becomes larger, the flexible vibration becomes stronger, and the assembly accuracy becomes higher during the assembly process, the research on multi robot cooperation to complete high-precision operation needs to be in-depth.

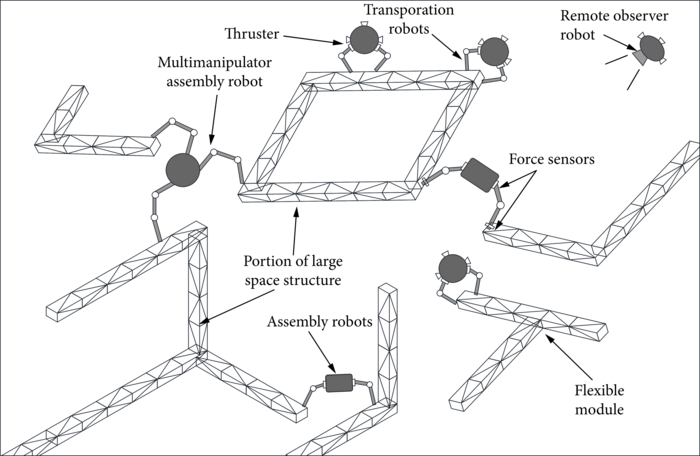
Afterwards, the author discusses the key technologies of space-on-orbit assembly, including assembly sequence planning, space robot motion planning, on-orbit assembly, and vibration suppression and compliance control methods. Firstly, based on the space robot motion planning and assembly sequence planning, the development of space robot planning algorithms was introduced. The planning of assembly sequences described the details of assembly operations in how different parts should be placed in a product. The traditional assembly planning method was greatly affected by human factors. At the same time, the increasing complexity of assembly structure and the diversification of assembly evaluation criteria also brought difficulties to assembly sequence planning. Computer intelligent assembly methods, such as virtual reality technology, could make up for this deficiency and improve the efficiency and reliability of assembly sequence planning. As for the motion planning, it was of great significance to the on-orbit operation of space robots. When a space robot performs on-orbit assembly in space, a basic task was to move the spacecraft from one point to another in the state space. For the spacecraft itself, its state space was the displacement and rotation of the spacecraft in the Cartesian coordinate system. Therefore, the traditional Dijkstra, A∗, and other algorithms can be used as path planning methods. Besides, commonly used intelligent bionic algorithms, including genetic algorithm, ant colony algorithm, and particle swarm algorithm were also applied. Secondly, the space robot assembly method was summarized. The artificial potential field method, machine vision method, neural network learning method and so on were developed and applied in important scenarios, i.e. assembling the large space truss and performing space multirobot multitask. At last, from the control point of view, how to solve the vibration suppression and compliant assembly of on-orbit assembly is reviewed. Due to the microgravity conditions in space, it was easy to cause vibration of large structures. Analysis of single and multiple robot assembly strategies, as well as the hybrid method of branch and bound and improved ant colony algorithm, could suppress the vibration disturbance. In the assembly contact process, there was direct contact between the targets, and a certain amount of force (moment) would be generated, so compliance control was also very necessary. The current compliance control methods are mainly divided into two categories: active compliance and passive compliance. Passive compliance was completely dependent on the properties of the material, cannot be controlled, and had high uncertainty. And active compliance referred to obtaining contact force information through sensors, using the information as a feedback input to the controller, and performing feedback control of the robotic arm to reduce the contact force and achieve the purpose of compliance control. Active force position control generally adopted traditional “force-position” hybrid control, impedance control, and other methods.
Then, in order to simulate the space assembly scene on the ground, the author introduced the development of ground verification experiments and provided ideas for the effective verification of space on-orbit assembly technology. Due to the high cost of space on-orbit construction, the space manipulator and its related control system and other environments must be verified on the ground to ensure that all equipment can operate normally before the space on-orbit assembly. The biggest difference between the ground and space was whether there was gravity, so how to simulate zero-microgravity conditions was the key and focus of ground test verification. At present, there were five commonly used ground verification methods, namely, air flotation method, water flotation method, force compensation method, parabola method, and free fall method. The space administrations or space institutes of various countries had established corresponding laboratories, especially the air flotation experimental platform and the gravity compensation experimental platform with the purpose of completing the “space-ground consistency” experiment on the ground and ensuring the accuracy and feasibility of the experiment.
Finally, the author summarized opportunities and challenges of on-orbit assembly in the future.
On-orbit assembly relies on space multirobot coordination and a super presence and the support intelligent interaction capabilities such as brain control, voice control, and eye control are worthy being developed.
More intelligent on-orbit assembly technology is boosting, including the autonomous decision-making functions, fault diagnosis and self-repair functions, autonomous mission planning, autonomous work, and learning capabilities.
Diversified capabilities of space robots are potential. The robots not only need to have long-distance transfer and movement functions, but also need to have the ability to complete high-precision operations and flexible operations including clamping, rotating, pulling, cutting, connector operation, and even own functions of robot group reconstruction, robot task reconstruction, and configuration reconstruction.
IMAGE CREDIT: Space: Science & Technology




Leave a Reply